





Aerotecnica Missili & Spazio, The Journal of Aerospace Science, Technology and Systems
G. Romeo, M. Pacino, F. Borello
Politecnico di Torino
Dipartimento di Ingegneria Aerospaziale
Disarikan oleh: Sunar[1]
Abstract
Penelitian yang sedang dilakukan ini (sebagai bagian dari beberapa proyek yang didanai EC-Komisi Eropa) dengan tujuan untuk merancang UAV dengan power sangat-Long Endurance menggunakan Solar panel (Very Long Endurance Solar Powered Autonomous Stratospheric UAV-VESPAS-UAV) dan manufaktur prototipe tenaga surya. Hal ini dapat memainkan peran satelit pseudo, dengan keuntungan yang memungkinkan pemotretan /pemantauan (vision ) lahan bumi yang lebih rinci karena relative lebih dekat terhadap permukaan bumi dan biaya yang jauh lebih rendah daripada satelit. Area dengan diameter 300 km bisa dipantau oleh satu platform (1 uav). Skala penuh UAV HELIPLAT® dan SHAMPO UAV dirancang menggunakan alat yang paling canggih untuk mendapatkan daya tahan lama terbang 4-6 bulan dan dapat beroperasi di hampir semua tipe kondisi lingkungan (dengan kecepatan jet stream sampai dengan 180km/ jam) pada ketinggian stratosfer (17 - 20 km). Sepanjang hari tersebut (4-6 bulan) akan terbang dengan 8 motor listrik brushless di mana power dihasilkan oleh sel-sel tipis panel surya efisiensi tinggi yang menutupi sayap dan ekor-horisontal pesawat. Pada malam hari akan didukung oleh sistem sel berbahan bakar gas hidrogen dan oksigen yang disimpan dalam tangki bertekanan. Muatan bisa hingga 150kg, dengan daya yang tersedia hingga 1500W, bisa dipasang di atas papan (board) untuk beberapa jenis aplikasi pemantauan lingkungan global dan keamanan (global monitoring of environmental and security applications -GMES). Sebuah prototipe dengan skala ukuran (rentang sayap 24 m, panjang 7m) telah dibangun untuk menunjukkan kelayakan proyek teknologi ini. Model Pesawat Kecil Tanpa awak dengan Electric Solar (Small Electric Solar Unmanned Airplane-SESA) dibangun untuk melaksanakan beberapa tes penerbangan eksperimental dengan UAV bertenaga surya kecil dan untuk testing dan menunjukkan beberapa teknologi dan aplikasi penting (critical). Menggunakan motor listrik brushless yang merupakan sumber power dengan efisiensi yang tinggi (21%) dari array silikon mono-kristal dan baterai Lipo. Struktur body pesawat ini seluruhnya terbuat dari fiberglass yang diperkuat plastik, kecuali kotak sayap, yang material kompositnya menggunakan serat karbon. Diproduksi sayap dengan bentang 7m dan 2 m2 sel surya yang terikat di atas permukaan sayap, dengan cara ini memperoleh daya tahan (endurance) yang jauh lebih tinggi hingga 8-10 jam pada bulan Juni dan Juli pada uji level penerbangan. Dengan berat bruto 35 kg, kemampuan payload adalah 5 kg. Pengujian eksperimental divalidasi dengan beberapa pengujian teknologi penting (critical) selama terbang dengan ketinggian sangat tinggi dan dalam waktu lama: pengujian sel surya efisiensi tinggi, motor brushless listrik, pengendali/kontrol, transmisi kamera video dan gambar termo, sistem telemetri, dan autopilot.
[1] Perekayasa di bidang Avionic, Pustekbang LAPAN
1. Pendahuluan
Teknologi UAV telah maju cukup pesat, bagi industri penerbangan harus siap untuk memperluas ke 'nilai tambah' baru dalam industri komersial – industry UAV sipil- Civilian Unmanned Aerial Vehicle (CUAV) industry. Pasar total (market total) UAV tumbuh dengan pesat dan penting sekali bahwa komunitas Eropa harus membuat usaha serius untuk mencapai segmen yang signifikan dari pasar ini. Berbagai macam aplikasi untuk UAV sipil, akan membuka berbagai potensi pasar untuk penjualan dan pertumbuhan ekonomi. Daya saing dalam Aerospace adalah strategis dan kompetisi utama untuk masyarakat Eropa dating dari Amerika Serikat. Karena pasar sipil untuk UAV meningkat, sebuah potensi besar akan tercipata untuk mempertahankan dan memperkuat daya saing industri dirgantara Eropa dalam bidang teknologi baru, yang akan menjamin dan menciptakan lapangan kerja yang berkualitas tinggi untuk masa depan. Dalam studi pasar bisnis baru-baru ini dilakukan oleh Frost dan Sullivan, pasar global untuk UAV dalam aplikasi sipil dan komersial diperkirakan mendekati $2 milyar pada tahun 2014 [?]. Saham pasar terbesar diharapkan berhubungan dengan operasi penjagaan pantai (Coastguard) dan Pengawasan Maritim, Keamanan Perbatasan dan Manajemen Kebakaran Hutan. Komunitas Ilmiah dapat mengambil manfaat dalam banyak hal dari menggunakan UAV di bidang sipil. Pemanfaatan UAV untuk patroli perbatasan dan pesisir, keamanan tanah air, pengintaian maritim, survey "Mata-mata-di-langit (Eye-in-the-sky)", akan memungkinkan penegakan hukum yang lebih baik-untuk melindungi warga negara dan integritas perbatasan. Pemanfaatan UAV untuk pemetaan kebakaran hutan, real-time monitoring daerah berisiko-seismik (rawan gempa), turbulensi udara, letusan gunung berapi (volkano) dan fenomena alam lainnya akan memastikan bahwa masyarakat menyadari bencana akan terjadi dan oleh karena itu dapat mempersiapkan diri untuk menghadapinya.
Di bawah koordinasi penulis pertama, penelitian sedang dilakukan (sebagai bagian dari beberapa proyek yang didanai EC) ([?],[?],[?],[?]). Dengan tujuan untuk merancang Very-Long Endurance Solar Powered Outonomous Stratosfera UAV (VESPAS-UAV) dan manufaktur prototipe tenaga surya.
Hal ini dapat memainkan peran pseudo-satelit, yang memungkinkan dapat mengamati permukaan bumi yang lebih rinci, karena relatif dekat terhadap bumi, dengan mengobservasi bumi terus menerus dan dengan biaya yang jauh lebih rendah dibanding menggunakan satelit. Sensor satelit dapat menawarkan akurasi yang baik – pada daerah spasial trade-off, terutama ketika satelit modern beresolusi tinggi diperhitungkan - tetapi data dengan akurasi tinggi cukup mahal saat ini.
Beberapa sistem satelit yang digunakan untuk pengamatan bumi tidak berguna untuk pengawasan perbatasan secara real-time kontinu karena keterbatasan resolusi spasial satelit. Semua perbatasan Laut Mediterania, dari Turki ke Spanyol dan kepulauan Canary, permukaan area tersebut dapat dikontrol secara elektronik menggunakan 9-10 platform UAV dari ketinggian (17-20 km), dengan ketahanan terbang sangat-lama (beberapa bulan) UAV stratosfer (dengan muatan sampai 150 kg, daya yang tersedia untuk payload sampai 1500W). Hal ini penting untuk mengontrol siapa dan apa yang masuk ke negara-negara Eropa untuk mencegah adanya teroris dan instrumen teror di perbatasan, sepanjang garis pantai dan pelabuhan. Pemantauan kontinu (24 jam), pemantauan perbatasan akan dijamin dan sehingga secara drastis akan mengurangi biaya pelayanan dan pekerjaan yang membosankan (Gbr. 1). Sebuah wilayah dengan diameter 300 km akan dipantau oleh masing-masing platform. Tidak ada proyek khusus diketahui berlangsung pada pengawasan perbatasan Laut Mediterania. Layanan ini saat ini dibuat oleh kapal-kapal atau pesawat terbang militer dengan beberapa pilot dan beberapa orang di atas kapal dan oleh karena itu merupakan biaya mahal jika ini suatu bisnis. Selain itu, hanya membuat kontrol spot, karena perbatasan begitu luas. Di Spanyol, pantai dari Maroko dikendalikan (terbatas hanya pada 50-60 km) dengan sistem radar (SIVE) dengan biaya 145 MEuro. Hal serupa, sistem yang sangat mahal sedang dibangun di sepanjang pantai Italia (lebih dari 2000 km). Berapa biayanya? Penjaga Pantai Italia memiliki biaya tinggi untuk ATR mereka 42MP untuk pengawasan perbatasan. Dengan awak minimal 7 biaya pesawat adalah sekitar Euro -7000-8000 selama satu jam penerbangan. Platform VESPAS juga dapat dengan mudah digunakan, dengan peralatan sensor api yang tepat, untuk monitoring kebakaran hutan (Gbr. 1). Layanan ini sering diminta di seluruh Eropa Selatan (Spanyol, Italia, Prancis Selatan, Yunani, dll) untuk pencitraan dari udara terhadap kebakaran lahan yang tidak digarap dan bencana yang berakibat pada alam dan manusia lainnya. Beberapa muatan yang tersedia dan kebanyakan muatan tersebut digunakan dari satelit, sensor yang ada dan ruang operasional yang direncanakan, karena ketinggian yang sangat tinggi di mana satelit beroperasi (500-600 km), maka menunjukkan keterbatasan serius jika parameter yang akurat harus diperoleh. Sebagai hasilnya, satelit-satelit hanya mengizinkan deteksi kebakaran dengan area sangat besar, dan tidak dalam hitungan pemantauan terus menerus. Kinerja yang lebih tinggi dapat tersedia dari instalasi sensor elektro-optik atau inframerah dari udara dan ketinggian penerbangan 17-20 km juga dimungkinkan untuk mendeteksi luasan api lebih pendek kurang dari satu meter (resolusi pemantauan lebih tinggi). Hanya 4-5 platform VESPAS stratosfir bisa mencakup area Italia dari Utara ke Selatan.

Figure 1. Sea and terrestrial border monitoring and fire monitoring
Elektronik Survei untuk seluruh Eropa Selatan jelas dapat diperoleh dengan Jaringan HeliPlat yang baik. Pemetaan kebakaran hutan sejak dini dapat direalisasikan dengan alat penginderaan api dengan inframerah. Maksimum distribusi radiasi cahaya spektral vegetasi kebakaran terjadi dalam gelombang tengah inframerah (MWIR-Mid Wave Infrared) di area panjang gelombang 3-5 µm. Oleh karena itu, rentang spektral gelombang inframerah pertengahan umumnya diakui sebagai kisaran spektral optimal untuk deteksi kebakaran. Untuk mengurangi biaya penerbangan yang tinggi dalam pengemudian pesawat, perlu memiliki kendaraan tak berawak dengan daya tahan yang sangat lama (beberapa minggu atau bulan) untuk mendapatkan pelayanan yang efisien. UAV yang lebih murah dari pesawat berawak lainnya dapat digunakan untuk pengawasan perbatasan. Dengan UAV terbang pada ketinggian 15-18 km dan dengan sensor yang tepat, adalah memungkinkan untuk mendeteksi perahu ilegal atau orang sepanjang perbatasan dan dengan Total Biaya Siklus Hidup- Total Life Cycle Costs sekitar 900-1000 Euro/jam penerbangan[?]. Keuntungan utama dari VESPAS adalah bahwa sistem ini memiliki sedikit peristiwa naik (climbing) dan turun (descent), yang penting ketika mempertimbangkan interferensi dengan lalu lintas penerbangan. Lain dengan konfigurasi Hale-UAV yang menawarkan daya tahan yang sangat terbatas (24-36 jam), yang secara drastis akan meningkatkan potensi resiko tabrakan dengan lalu lintas penerbangan sipil.
Sebanyak dua kali lipat jumlah UAV akan diperlukan untuk terus menjamin layanan pengawasan, sehingga Total Biaya Siklus Hidup Sistem akan meningkat menjadi besar. Konfigurasi lainnya adalah Ketinggian Menengah Endurance Panjang (MALE) – UAV menawarkan kerugian lebih lanjut; yang jauh lebih banyak lagi UAV yang diperlukan untuk terus menerus melingkupi seluruh Laut Mediterania, karena luasan yang dinaungi berkurang dengan nilai kuadrat dari ketinggian terbang (Gambar 2), sedangkan Total Biaya Siklus Hidup akan meningkat sangat tinggi dengan konfigurasi MALE. Pada kenyataannya akan dibutuhkan konfigurasi UAV yang memiliki daya tahan sangat tinggi, meliputi kebutuhan keandalan misi, tinggi kendaraan udara, sistem dan muatannya.

Figure 2. HALE monitoring application advantages
Multi-sensor terpadu, interoperable sistem, berbasis pada penggunaan sensor dan pengawasan area local rata-rata (misalnya UAV, satelit, dll.) dan konsep multi sensor (misalnya sensor I/R dan E/O, SAR, hiper spektral ,fusi sensor, pengolahan,dll) untuk pengawasan perbatasan dari ketinggian stratosfer sedang dipelajari untuk mendeteksi, sekalipun dalam iklim dan cuaca buruk, perahu/kapal dengan migran ilegal atau teroris mencapai pantai Eropa selatan dari Afrika Utara atau negara Timur Tengah atau kapal nelayan ilegal lainnya. Informasi yang diperoleh akan dikirim ke stasiun kontrol dan dari sini ke jaringan di mana Lalu Lintas Data Maritim Pusat dipertukarkan melalui Internet. Hal ini juga menyediakan alat yang ampuh untuk menggambarkan lingkungan laut untuk pemantauan habitat. Semua fitur tersebut mengakibatkan:
• Mengurangi biaya per Jam Penerbangan melalui peningkatan luas dalam ketahanan jam terbang.
• Berpotensi meningkatkan biaya perolehan, tetapi mengurangi biaya pemeliharaan dan suku cadang.
• Mengurangi biaya - cakupan area yang lebih besar per pesawat, memerlukan pesawat lebih sedikit per daerah.
• Peningkatan keselamatan operasional karena penerbangan berada di atas lalu lintas penerbangan dan di atas kondisi cuaca yang merugikan, sehingga interferensi jadi berkurang terhadap lalu lintas penerbangan.
Tidak ada satu pun platform stratosfir riil dengan daya tahan yang sangat-lama tersedia di Eropa. Beberapa sudah tersedia di Amerika Serikat. Beberapa jenis platform ketinggian tinggi tenaga surya (HASP-High Altitude Solar Powered) yang dirancang sebelumnya. Pada akhir 1994, NASA memulai program ERAST-Environmental Research Aircraft and Sensor Technology (Penelitian Lingkungan Pesawat dan Teknologi Sensor) [?]; Salah satu dari empat pesawat adalah platform Pathfinder berenergi surya yang ketinggiannya melebihi 24 km dalam 15 jam penerbangan. Pada musim panas tahun 2001, platform bertenaga surya Helios menetapkan rekor baru dunia ketinggian 29.350 meter, yang terbang beberapa hari di tahun 2003. Sebuah pesawat, tak berawak bertenaga surya sedang dikembangkan oleh Boeing dan QinetiQ untuk Pemerintah Amerika Serikat (US Defence Advanced Research Projects Agency) untuk digunakan dalam tugas-tugas militer dan sipil [?].
Kendaraan udara Unmanned berdaya tahan lama (tahunan) dapat digunakan untuk menggantikan satelit konvensional. POLITO (di bawah bimbingan ilmiah Prof G. Romeo) telah bekerja pada salah satu dari tiga proyek dunia yang ada pada platform aerodinamik stratosfir bertenaga surya selama beberapa tahun. Setelah dana awal oleh Badan Antariksa Italia, merupakan dorongan yang sangat besar untuk proyek ini diperoleh dengan adanya dukungan keuangan yang diterima dari Komisi Eropa di bidang platform stratosfir (HeliNet,
Capecon, Enfica-FC, Tango) ([?],[?],[?], [?]). Kemungkinan daya tahan menengah-panjang (4-6 bulan) untuk platform stratosfir dapat diperoleh melalui penerapan sistem energi berbasis hidrogen terpadu. Ini adalah sistem loop tertutup: selama siang hari, daya yang dihasilkan oleh sel surya tipis efisiensi tinggi yang menutupi sayap dan ekor horisontal pesawat untuk motor listrik tenaga untuk terbang dan untuk electrolyser yang memecah air menjadi dua komponen, hidrogen dan oksigen. Kemudian pada malam hari, gas-gas yang disimpan dalam tangki bertekanan digunakan sebagai gas inlet untuk fuel cell stack untuk menghasilkan tenaga listrik DC dan air yang dipasok ke electrolyser tersebut. Karena sel bahan bakar merupakan pembangkit listrik yang bersih dan efisien, maka merupakan alternatif yang sesuai untuk menggantikan sumber energi konvensional. POLITO akan memanfaatkan hasil dan temuan yang sedang diperoleh dalam proyek Uni Eropa yang sedang berjalan yang didanai ENFICA-FC(ENvironmentally Friendly Inter Inter City Aircraft powered by Fuel Cells) dikoordinir oleh Prof G. Romeo. Sebuah pesawat dua-tempat duduk digerakkan dengan motor-listrik menggunakan bahan bakar sel sedang dikembangkan dengan mengkonversi pesawat efisiensi tinggi yang ada dan akan memvalidasi dengan tes-penerbangan yang direncanakan pada Oktober 2009 ([?] [?]). Heliplat/Shampo UAV sedang dianalisis sebagai bagian dari EC (Europe Council) mendanai proyek Tango[?] (Di bawah bimbingan ilmiah Prof G. Romeo untuk Polito) bekerjasama dengan beberapa sistem satelit untuk aplikasi sipil GMES (Global Monitoring Environmental and Security). Demonstrasi akan mengintegrasikan solusi satelit telekomunikasi dengan perkembangan yang sedang berlangsung GMES dalam rangka pengelolaan perikanan.
Pencantuman UAV dalam infrastruktur relay global memungkinkan menguasai system real time dan akses berkesinambungan untuk zona khusus dalam rangka pemantauan atau surveillance. Sebuah uji terbang sedang disiapkan dengan skala UAV tenaga surya untuk integrasi akhir dengan enveloptment/lingkup GMES dalam rangka pengelolaan perikanan.
2. HELIPLAT® VESPAS
Skala penuh UAV HELIPLAT® (Helios Platform) (Gbr. 3) dirancang dengan menggunakan alat yang paling canggih untuk mendapatkan daya tahan beberapa bulan (4-6) dan beroperasi di hampir semua kondisi lingkungan yang khas (aliran jet sampai 180km/h) pada ketinggian stratosfer (17-20 km)([?] - [?]). Kendaraan harus mendaki ke 17-20 km dengan mengambil keuntungan dari radiasi matahari langsung dan selanjutnya mempertahankan level penerbangan, energi listrik yang tidak diperlukan untuk operasi propulsi dan muatan dipompa kembali ke dalam sistem penyimpanan energi sel bahan bakar dan, selama malam hari, platform akan mempertahankan ketinggian melalui penggunaan energi (matahari) yang tersimpan; posisi geostasioner akan dipertahankan oleh tuning level penerbangan balik. Sebuah program komputer dikembangkan untuk merancang sebuah platform yang mampu tetap tinggi selama jangka waktu yang sangat lama dan untuk mendapatkan pemahaman secara menyeluruh tentang kelayakan konsep ketinggian tinggi aerodinamis, motor listrik, panel surya dan teknologi fuel cell, dengan khusus memperhatikan bentuk platform stratosfer. Perubahan radiasi matahari lebih dari satu tahun, ketinggian, profil angin terhadap ketinggian, massa dan efisiensi dari sel surya dan fuel cell, pertunjukan aerodinamis, massa struktur, dll turut diperhitungkan. Penggunaan serat karbon modulus tinggi dibuat dalam merancang struktur untuk mengurangi berat badan pesawat. Proyek platform selesai sampai tahap desain quasi-akhir. Analisis aerodinamis numerik dilakukan untuk memperoleh efisiensi tertinggi dari sayap utuh dan pesawat. Beberapa tes ekaperimental dilakukan dalam terowongan angin Low-Speed-Low-Turbulensi dan hubungan yang sangat baik diperoleh antara hasil analitis dan eksperimental. Sebuah konfigurasi HELIPLAT® pertama (Gbr. 3) telah berhasil, sebagai akibat dari studi desain awal. Platform ini adalah pesawat udara bersayap sepasang dengan 8 motor brushless, jenis ekor twin-boom, stabilizer horizontal dan dua kemudi. Prosedur desain diikuti dengan analisis didasarkan pada keseimbangan energi antara




3.1. Power Sistem Elektronik 
3.2. Sistem Payload
Untuk menunjukkan/melihat kesempatan memperkenalkan platform tersebut dalam sistem surveilans atau pemantauan, model telah dilengkapi dengan kamera CCD warna nirkabel (40x zoom, resolusi 720x576 pixel) dan dengan kamera infra merah termo (160x120 pixel), kamera video zoom bisa dikendalikan dari jauh dengan interface RS-485. Kedua kamera dapat mengirimkan langsung (di frekwensi 1.2GHz), dalam rentang sekitar 1-1,5 km di udara terbuka dan melalui perangkat periferal yang tepat untuk menangkap ke PC (Gbr. 11). 
tenaga surya yang ada dan daya yang diperlukan untuk terbang, parameter ketahanan secara khusus dipenuhi untuk meminimalkan daya yang diperlukan untuk penerbangan horizontal?. Karakteristik utama untuk penerbangan di 38 lintang N dan ketinggian 17 km adalah:
• Total berat: 8500N; Wing Area: 176m2;
Span: 73m; Diperlukan Power: 7500W; Aspek rasio = 33; Kecepatan Cruise = 71 km / jam.
Span: 73m; Diperlukan Power: 7500W; Aspek rasio = 33; Kecepatan Cruise = 71 km / jam.
Sebuah muatan hingga 130kg, dengan daya yang tersedia hingga 1300W, akan dipasang di atas pesawat untuk beberapa jenis aplikasi pemantauan lingkungan global dan keamanan (GMES). Analisis numerik aerodinamis dilakukan untuk memperoleh efisiensi tertinggi dari sayap dan pesawat termasuk baling-baling (Gbr. 3), dengan menggunakan software VSAERO, di nomor Reynolds (Reynolds Number) penerbangan. Alat/tools desain (seperti CATIA) (Gbr. 3) dan analisis struktur FEM (MSC/Patran/ NASTRAN) digunakan untuk merancang sayap komposit (sekitar 75m panjang), rumah payload, booms dan struktur ekor, dan untuk mendapatkan efisiensi struktur tertinggi. Ekstensif digunakan dari grafit modulus tinggi/bahan epoxy dibuat untuk mendapatkan struktur sangat ringan- kekakuan tinggi. Sebuah prototipe skala ukuran 1:3 (span sayap 24m, ekor horisontal span 10m, panjang 7m) dibangun dengan material komposit canggih (modulus tinggi CFRP) untuk menunjukkan kelayakan teknologi (Gbr. 4). Manuftur EADS – CASA memproduksi CFRP elemen tunggal: sayap tubular dan tulang rusuk/kerangka, tubular ekor horizontal dan vertikal dan tulang rusuk, booms dan kelengkapan logam. Politecnico-DIASP, dan ARCHEMIDE Advanced Komposit, mengumpulkan berbagai bagian dari pesawat (sayap, ekor horisontal dan vertikal, booming) dan seluruh pesawat.
Beberapa tes statis geser/lentur/puntir (Gbr.4) dilakukan di laboratorium kami pada produksi prototipe skala ukuran lengkap dan hubungan yang sangat baik ditemukan antara analisis numerik dan analisis FEM. Alat mekanik ini dirancang dan diproduksi untuk melakukan pengujian; system terdiri dari baja yang mendukung struktur untuk mempertahankan skala prototipe dan sistem pohon-balok dan dongkrak hidrolik untuk memberi beban. Dua troli digunakan untuk mendukung sistem pohon-balok sedemikian rupa sehingga sistem menyesuaikan dengan perilaku defleksi prototipe. Sebuah beban dummy ke badan pesawat (fuselage) dirancang untuk memeberikan beban sesuai yang diharapkan ke pusat model. Strain gauges dan transduser pengukur dipasang di sepanjang tiang utama sayap untuk memperkirakan deformasi dan defleksi sayap. Hasil strain (tekanan) ini sepanjang sayap, untuk kondisi penerbangan sama dengan saat menjelajah seperti pada diagram n-V (batas beban maksimum n = 3), dan defleksi sayap dilaporkan dalam gambar 5; tercatat defleksi ujung sayap maksimum 500 mm (kiri) dan strain sayap maksimum 650 mikron. Sebuah hubungan yang sangat baik diperoleh antara (teori yang dikembangkan)[?], analisis numerik (Nastran) dan hasil eksperimen. Beban maksimum (n = 3) dicapai tanpa efek residu yang merugikan. Prototipe ini tunduk pada batas beban (n = 4.5) untuk mendapatkan margin keamanan struktur; dalam hal ini, tidak ada efek merugikan yang dicatat. Sebuah tes statis sampai dengan kegagalan beban dilakukan hingga lebih dari dua kali batas beban (N = 7,5) mendapatkan korelasi yang sangat baik antara analitis kegagalan hasil dan eksperimental. Suatu struktur ringan harus didesain untuk proyek akhir, berdasarkan hasil eksperimen ini.
Hasil yang diperoleh dalam proyek CAPECON[?], konfirmasi kelayakan dari stratosfer UAV tenaga surya (Shampo memenuhi persyaratan penerbangan dengan daya tahan stasioner lama). Desain aerodinamis dan struktur rinci, mekanik penerbangan dan sistem listrik diselesaikan oleh Politecnico di Torino sampai desain akhir berhasil dikuasai. Sebuah efisiensi aerodinamis dan struktur yang lebih besar akan diperoleh massa payload lebih besar (150 kg) dan power lebih besar (1,5 kW). (Gbr. 6)

Figure 3. HeliPlat® Configuration, Aerodynamic Results and 3D details.
Figure 4. 1:3 Scaled-size HeliPlat® UAV
3. Pesawat tak berawak Kecil Tenaga Surya
Model terbang dari Electric-Plane ini dibangun, sebagai bagian dari proyek uav CAPECON yang didanai Komisi Eropa, untuk melaksanakan beberapa tes penerbangan eksperimental dengan UAV kecil untuk mendemonstrasikan beberapa teknologi dan aplikasi kritis. Model awal (skala 1:2.8 replika Super Dimona (span sayap 5.8m, berat 20kg, efisiensi 24, kecepatan jelajah minimum 15m/s) dimodifikasi dengan mengganti sistem pembakaran propulsi dengan listrik yang meliputi motor brushless tunggal dan baterai NiMh. Sistem struktur ini terealisasi dengan menggunakan fiberglass diperkuat plastik dan bahan serat karbon-komposit untuk sayap. Kemampuan payload adalah diharapkan 5-6 kg. Sebagai bagian dari proyek yang didanai Komisi Eropa yaitu proyek Tango, baterai NiMh telah diganti dengan baterai Lipo isi ulang, terutama digunakan selama fase take-off.
Sebuah span sayap baru diproduksi sepanjang 7 m dan panel array silikon mono-kristal 2 m persegi tipis efisiensi tinggi (21%) terikat di atas kulit sayap (Gbr. 7), dalam penerbangan daya yang diperlukan diperoleh dari sistem sel surya yang menutupi sayap, dan dengan cara ini daya tahan jauh lebih tinggi hingga 10 jam dapat diperoleh selama bulan Juni dan Juli. Semua struktur dirancang sesuai dengan EASA-VLA untuk menahan batas beban 3,8. Daya yang dihasilkan oleh sel surya SESA selama berjam-jam sehari dan selama berbulan-bulan yang berbeda-beda seperti dilaporkan dalam Gambar 8. Karakteristik utama dari UAV kecil tenaga Listrik Surya (SESA), adalah: Wing span: 7m; Luasan Wing: 2,2 m2; berat kotor Total: 35kg; Max Solar Power: 370-395 W (45o-36o N, Juni); Max daya Motor brushless: 3000W; Daya Penerbangan Horizontal: 350 W; Minimum Kecepatan: 36 km / jam.


Figure 5. 1:3 Scaled-size HeliPlat R UAV and Shear/Bending and Torsion Tests and Results

Figure 7. Small Electric Solar Unmanned Airplane
Figure 8. Daily SESA Power for several months
SESA melakukan penerbangan pertama menggunakan tenaga surya pada Oktober 2007, dekat Turin (45o Lintang Utara) dengan ketinggian sekitar 300m [?]. Pesawat ini adalah UAV pertama Eropa bertenaga surya yang terbang di Eropa. Pada tahun 90-an, DLR (Jerman Aerospace Centre) memproduksi dan menerbangkan UAV "Solitair" skala model tenaga surya tetapi model ini tidak lagi aktif. Pada bulan September 2007, "Zefanya", UAV model tenaga surya oleh Qinetiq, diterbangkan di New Mexico. Pengujian eksperimental dilakukan sampai sekarang telah divalidasi dengan beberapa teknologi penting untuk ketinggian yang tinggi ketahanan terbanga sangat lama: sel surya efisiensi tinggi, motor listrik brushless, pengendali, kamera video dan transmisi gambar termo, sistem telemetri, dll. Hasil ini akan sangat berguna untuk tim kami untuk proyek-proyek masa depan.
Manajemen system power elektronik saat terbang diperlihatkan pada gambar 9
Figure 9. SESA Power electronic system
Daya yang dihasilkan oleh sel surya secara langsung mensuply ke motor listrik brushless untuk penerbangan level. Selama take-off dan mendaki (climb), atau untuk beberapa manuver tertentu yang membutuhkan daya lebih, daya juga diberikan oleh baterai Lipo. Panel surya terdiri dari serangkaian rangkaian paralel 130 sel surya masing-masing dengan efisiensi 21,5% (@1000W/m2 dan 25o C). Tegangan maksimum Panel surya 43.5V. Pengembangan perangkat MPPT elektronik (Maksimum Power Point Tracking) adalah penting bagi keberhasilan misi penerbangan untuk mengoptimalkan daya maksimum yang dapat diperoleh oleh sel-sel surya dan untuk meningkatkan daya tahan (Gbr. 10). Inverter akan memasok listrik (juga lebih dari 3kW) ke motor listrik brushless. Pendinginan inverter, untuk menghindari sistem berhenti operasi karena operasi temperatur maksimum yang diijinkan tercapai, juga merupakan fitur penting yang harus diperhatikan. Setiap tenaga sel surya yang melebihi daya yang diperlukan penerbangan akan digunakan untuk mengisi ulang baterai.

Figure 10. SESA solar cell curve and MPPT
PC dapat digunakan untuk menganalisa gambar secara real-time, misalnya, secara otomatis mendeteksi kebakaran hutan skala kecil.
3.3. Remote Control dan Sistem Telemetri
Saat ini UAV dapat dikendalikan dari jauh oleh modem radio. Sampai dengan 12 servo-actuator dapat dikontrol untuk penerbangan UAV. Unsur-unsur nyata yang dikendalikan adalah: kemudi dan ekor gear, 2 lift, 2 ailerons, rpm motor. Sebuah sistem telemetri (Gbr. 12) juga telah dipasang di papan untuk mengirimkan secara real time semua data yang paling penting untuk keselamatan penerbangan ke stasiun kontrol di bumi. Data-data tersebut dicatat dan dikirim secara nirkabel ke Ground Control Station untuk terus memiliki kondisi penerbangan nyata dari pesawat:
1. True Air Speed
2. Kondisi Tegangan dan motor brushless saat ini
3. Tegangan dan konsumsi baterai motor utama saat ini
4. Kondisi suhu dari motor dan inverter.
3.4. Sistem Autopilot dan Arsitektur Misi
Sebuah autopilot telah diakuisisi dan sedang dipasang di atas pesawat untuk penerbangan otonomous hingga 50km melalui penggunaan pengolahan data akuisisi yang sangat terintegrasi, dan sistem kontrol, ini meliputi semua komponen yang diperlukan untuk kontrol pesawat. Sistem Autopilot (dirancang dan dibangun oleh Mavionics GmbH, D) terdiri dari tiga bagian utama:
1) Blok Sensor TrIMU berisi lengkap 3-axis Unit Pengukur Inersia (IMU) dan dua sensor tekanan untuk ketinggian barometric dan penentuan kecepatan udara. System ini menghasilkan sampai dengan 12 sinyal kontrol servo secara independen.
2) Core Host Navigasi merupakan filter navigasi canggih untuk data fusi GPS/IMU yang memungkinkan penentuan tepat dengan stabil dan dalam jangka panjang dari posisi, kecepatan dan sudut Euler pesawat dan untuk mendapatkan penentuan sikap yang handal.
Satelit Receiver Navigasi. GPS Penerima 16 kanal dengan sensitivitas tinggi dan patch antena keramik terpadu. Hubungan antara Core dan Receiver Satelit Navigasi adalah hanya melalui saluran power dan data digital sehingga secara signifikan mengurangi gangguan/noise. On-board sistem autopilot dengan Ground Control melalui data link dua arah secara langsung, menggunakan modem radio yang beroperasi pada frekwensi 868 MHz Eropa. A/P secara berkala mengirimkan data (waktu GPS, posisi, sudut Euler, kecepatan penerbangan, dll) ke GC pada kecepatan 4 Hz, dan data pemantauan kesehatan system (tegangan baterai, motor listrik saat ini tetapi dengan kecepatan frekwensi data yang lebih rendah. Kontrol langsung melalui modem radio tidak 1) menimbulkan masalah latensi, namun, ketika kita beralih ke Iridium L-Band Transceiver, jumlah data per Status Pesan (80bytes per paket data) dari pesawat sepertinya tidak menjadi masalah tetapi frekuensi update dan latensi bisa kritis. Tidak ada masalah yang berarti saat menggunakan Transceiver L-Band (berat 650g, latency kurang dari 1 detik).
Namun, latency 5 sampai 20 detik bisa menjadi mungkin untuk komunikasi data Short Burst (berat 170g). Sehingga autopilot bahkan tanpa koneksi ke GC, latency bukan masalah keamanan langsung untuk penerbangan otomatis, satu kali dikirim ke autopilot, A/P akan mengikuti splines bahkan tanpa bantuan dari GC. Oleh karena itu, latency bukan merupakan masalah serius bagi keselamatan penerbangan otomatis itu sendiri, tapi latency adalah penting untuk setiap jenis intervensi manual dan karenanya juga menjadi masalah keamanan. Selain itu, kerugian berarti sering hilangnya koneksi data telemetri dan informasi tentang konsumsi baterai dan hilangnya kontrol Endurance. Selain itu, misalnya keterlambatan pengiriman gambar dari pesawat yang diambil oleh kamera onboard bisa menyebabkan beberapa masalah dalam pendeteksian kapal ilegal. Ukuran kecil skala UAV demo menghalangi penggunaan sistem satelit geo bandwidth tinggi. Sistem yang hanya mampu diinstal adalah mereka yang memiliki antena kecil, dan dengan demikian sistem dapat beroperasi Low Earth Orbit (LEO) (Iridium / Globalstar). Sistem Komunikasi berbasis satelit sedang diinstal onboard untuk Iridiumc atau jaringan serupa (Gbr. 14). Sebuah pemisahan yang lengkap antara sistem autopilot dan sistem payload diadopsi untuk memperoleh konfigurasi Penerbangan yang Aman.
Sambungan langsung radio akan digunakan selama fase penerbangan kritis (take-off dan landing) dan untuk integrasi sistem dan pengujian, dan menggunakan sistem berbasis satelit Iridium untuk penerbangan lebih lama di lepas pantai. Sinyal dari penerima pada 2.4GHz-board/RC dihubungkan ke autopilot dan mekanisme switching khusus di dalam autopilot akan memungkinkan autopilot diremote oleh remote control setiap saat, selama pemancar remote control dalam range jangkauan pesawat. Kisaran sistem ini 1 sampai 2 km, yang sesuai untuk rentang visibilitas pilot manual. Dengan cara ini, setiap kerusakan yang mungkin terjadi dari sistem autopilot atau telemetri teratasi dan keselamatan penerbangan ditingkatkan menjadi lebih besar. Transceiver telemetri yang sama (radio modem) dibutuhkan untuk ground segment. Selain itu, antena directional dapat digunakan sehingga sangat meningkatkan jangkauan dan keandalan koneksitas data. Stasiun kontrol bumi (GCS) pada dasarnya terdiri dari PC dan perangkat lunak kontrol yang merupakan user interface ke sistem UAV SESA untuk perencanaan misi dan kontrol.
Semua pekerjaan perencanaan misi dilakukan intuitionally pada peta yang mendasarinya. Hal ini memungkinkan desain jalur penerbangan sangat fleksibel dan aman. Pengecekan yang berkaitan dengan kinerja pesawat dilakukan secara otomatis untuk memastikan penerbangan UAV realistis dan aman.
4. Demonstrasi Penerbangan UAV untuk pengamatan laut
Demo penerbangan SESA memiliki karakteristik sebagai berikut: UAV akan lepas landas dari pantai Italia. (Gbr. 14).
1. UAV akan dikendalikan secara manual untuk lepas landas.
2. Setelah di udara, maka akan beralih ke modus auto pilot hingga mencapai tujuannya.
3. Posisi kapal dikirim ke otoritas lokal yang akan memprogram UAV untuk mencapai koordinat kapal
4. Kapal target akan berada di luar saling berhadapan (line of sight) dan masih dalam jangkauan gelombang RF, yaitu panjang gelombang 20nm
5. Ketinggian terbang antara 150m dan 300m.
6. Penerbangan ini akan sepenuhnya di atas air dan sejauh mungkin dari garis pantai Italia tetapi dalam ZEE Italia
Gambar akan dikirim terus-menerus ke ruang operasi (kemungkinan besar PC dan antena di kendaraan) di lokasi take-off. Target koordinat untuk auto pilot mungkin 1. diperbarui selama penerbangan jika kapal telah bergerak.
2. Ketika tiba di lokasi kapal, UAV akan mengambil beberapa gambar resolusi tinggi.
3. Setelah misi tersebut telah dilaksanakan, maka UAV akan memprogram secara otomatis terbang kembali ke lokasi take-off.
4. Ketika pesawat menjangkau remote control dan dalam garis pandang operator,UAV diaktifkan kembali ke modus manual agar menjadi aman saat mendarat. Ketika UAV berada pada jarak kurang dari 5 kilometer dari GCS, sebuah redundansi ganda transmisi diharapkan untuk alasan keamanan (baik hubungan radio langsung dan transmisi satelit yang mungkin untuk mengendalikan UAV).
5. Total durasi penerbangan akan menjadi sekitar 3 jam, tergantung pada jarak ke pantai. Telah diperkirakan dua jam untuk take off, untuk masuk ke posisi dan untuk mengambil gambar dan satu jam untuk kembali dan mendarat.
Pembicaraan dengan pihak berwenang CAA Italia tentang penerbangan UAV harus ada untuk memperoleh Izin terbang (Fly). Karena berat SESA hanya 30kg dan karena itu harus digunakan untuk penelitian dan tujuan ilmiah, sertifikat EASA tidak diperlukan. Namun demikian, item berikut harus diperhatikan seksama:
• Lihat dan Hindari sistem di atas kapal;
• Penerbangan di daerah non penduduk (meskipun energi kinetik maksimum 95 KJ yang tidak harus dicapai);
• Kontrol langsung secara manual visual diperlukan untuk mendapatkan penerbangan yang aman dan untuk menghindari redundansi double-triple. SESA harus diikuti selama penerbangan demo dari kapal dengan pilot on board untuk setiap control remote darurat UAV. Jika perlu R / C dapat mengintervensi A/P kontrol setiap saat.
• Tidak ada kondisi kegagalan merupakan hasil dari kegagalan komponen tunggal; yang ada dalam kemungkinan secara Probabilitas Kuantitatif (per 1 jam penerbangan) sedikitnya 106
5. Struktur Fuslage Baru
Struktur pesawat baru telah dirancang untuk posisi yang lebih baik dari massa di dalam pesawat dan untuk pusat grafitasi lebih baik. Struktur ini dirancang untuk menahan batas beban 3,8. Struktur tersebut telah dibangun oleh perusahaan "Advanced Archemide komposit " menggunakan plastik fiberglass mengekang-paksa untuk material kulit body frame dan komposit serat karbon untuk beberapa frame, terutama dalam kaitannya dengan sayap. Sebuah cetakan diwujudkan untuk tata letak yang tepat dari body frame. Boom yang menghubungkan body dan ekor telah dibuat dari serat karbon. Landing gear baru juga telah diproduksi oleh CFRP. Pesawat baru telah dipasang dan dilaporkan dalam Gambar. 15.
6. Kesimpulan
Kesimpulan berikut dapat dijadikan sebagai hasil dari penelitian bertahun-tahun di bidang UAV tenaga surya:
• MEMILIKI-UAV dapat digunakan setidaknya untuk lokasi lintang rendah di Eropa dan selama 4-6 bulan penerbangan berkesinambungan.
• Deteksi Dini Kebakaran Hutan, Patroli Perbatasan dan pemantauan Perikanan akan mungkin dengan biaya yang jauh lebih murah dan pada resolusi yang lebih tinggi daripada menawarkan sistem saat ini, dan itu akan diperoleh terus menerus.
• CFRP elemen struktur yang sangat ringan yang layak. Korespondensi yang baik telah diverifikasi antara analisis eksperimental, analisis dan FEM.
• Motor listrik brushless dan sistem bahan bakar sel yang layak.
• Tes penerbangan awal dari sebuah item yang kritis sedikit yang dilakukan berturut-turut, memverifikasi fungsi yang benar dari teknologi kritis baru yang terlibat dalam penerbangan: produksi tenaga surya, sistem listrik, sistem telemetri, dan kontrol penerbangan.
REFERENCES
1. “HELINET: Network of the Stratospheric Platforms for Traffic Monitoring, Environmental Surveillance and Broadband Services”, Responsible of the HeliPlat Design and Manufacturing: Prof. G. Romeo, EC 5◦ FP-2000-03.
2. “CAPECON:Civil UAV Applications and Economic Effectivity of Potential Configuration Solutions”, EC 5◦ FP.WP Leader of 3 HALEs Design: Prof. G. Romeo.
3. “ENFICA-FC: ENvironmentally Friendly Inter City Aircraft powered by Fuel Cells”, EC-6FP-2005-30779-AERO-1, Ott. 2006 - 09. Coordinator: Prof. G. Romeo.
4. “TANGO: Telecommunications Advanced Networks for Gmes Operation”, (SIP5-CT-2006-030970-2006-09).Coord. Eads Astrium. Polito Scientific Resp.: Prof. G. Romeo.
5. D. Cohen, “2005 Global markets for civil and commercial UAVs”. Frost and Sullivan Interactive Briefing, UAVNET, available from http://www.uavnet.com.
6. B. Curtin, “Solar-Powered UAV Development for NASA”. International Technical Conf. on “Uninhabited Aerial Vehicles. UAV 2000”. Paris, France, 14-16 June 2000.
7. J.R. Wilson,“Fly like a Vulture”, Aerospace America.pp. 29-33, 2008.
8. G. Romeo, “Design of High Altitude Very-Long Endurance Solar-Powered Platform for Earth Observation and Telecommunication Applications”, J. Aerotecnica Missilie Spazio, Vol.77, n.3-4, pp. 88-99, 1998.
9. G. Romeo, G. Frulla, E. Cestino and G. Corsino, “HELIPLAT: Design, Aerodynamic and Structural Analysis of Very-Long Endurance Solar Powered Stratospheric UAV”, AIAA Journal of Aircraft, Vol.41, n.6, pp. 1505-1520, 2004.
10. G. Romeo and G. Frulla, “HELIPLAT: High Altitude Very-Long Endurance Solar Powered UAV for Telecommunication and Earth Observation Applications”, AThe Aeronautical Journal, Vol.108, n.1084, pp. 277-293, 2004.
11. G. Romeo, G. Frulla and E. Cestino, “Design of high altitude long endurance solar powered unmanned air vehicle for multi-payload and operations”, Journal Of Aerospace Engineering Part G., Proc. IMechE, Vol.221, pp. 123-128, 2007.
12. I. Tuzcu, P. Marzocca, E. Cestino, G. Romeo and G. Frulla, “Stability and Control of a High-Altitude-Long-Endurance UAV”, Journal of Guidance, Control and Dynamics, Vol.30, n. 3, pp. 713-721, 2007.
13. G. Romeo and G. Frulla, “HELIPLAT: Aerodynamic and Structural Analysis of HAVE Solar Powered Platform”, Proceedings 1st AIAA Technical Conference and Workshop on Unmanned Aerospace Vehicles, Systems, Technologies and Operations, Portsmouth, VA, USA, May 20-23, 2002.
16. G. Romeo, G. Frulla, E. Cestino and G. Corsino, “HALE UAV Solar Configuration Cost Estimation”.
Figure 11. Video and Thermo camera wireless system and acquisition examples
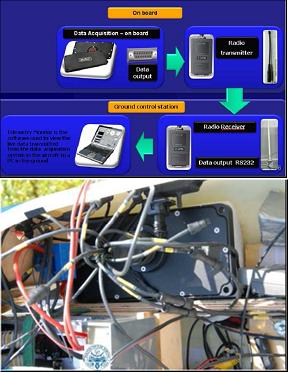
Figure 12. Telemetry wireless system and data logger.






